Table of Contents

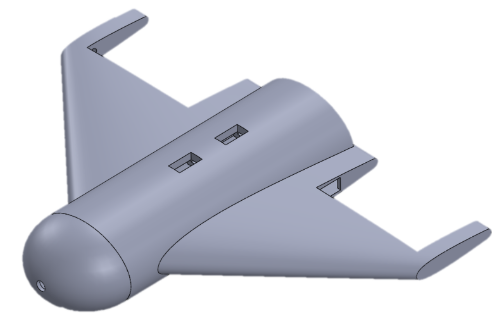
Lawn Dart 1
2025
Abstract
Design and build a reusable autonomous lawn dart which can be deployed at an altitude, allow for 3 seconds of free-fall, and then self-navigate towards a target on the ground. As a bonus, use a propulsion system to facilitate a "soft" landing upon the target.




Project Details
Design, build, and test a reusable active-controlled lawn dart that autonomously adjusts its flight path to hit a target after being released at altitude. Implement control surfaces or thrust vectoring to adjust the dart's flight path. Use sensors to provide feedback for real-time adjustments. Develop a feedback loop to steer the dart towards the target. Ensure the dart is stable in flight before control systems take over. After the free-fall segment, use a propulsion system to land the dart softly on the target.
Project Objective
Successfully design a reusable active controlled lawn dart using off the shelf
products within a budget of $1310, by 4 people in 3 months.
Mission Needs
Deploy at an altitude that allows for a 3 second free fall and autonomously
adjusts its flight path to hit a target.